BAGI Zoltán, 3. osztályos tanuló, Beszéded József Mezőgazdasági és Műszaki Iskolaközpont, Magyarkanizsa
Felkészítő tanár: Tóth Béla
Tárcsafék kinematikai szimulációja
A fékek a jármű lassítására, megállítására és rögzítésére szolgálnak. A jármű sebességét szükség esetén csökkenteni kell, adott körülmények között egészen megállításig. Erre szolgál a fékrendszer. A személygépjárművekben általában csak az első, de esetenként a hátsó kerekek lassítását/megállítását is tárcsafékek segítik. A tárcsafékek két alapvető változatát alkalmazzák: a merevnyerges és az úszónyerges szerkezetet.
Az iskolánkban használatos Solid Edge nevű modellezőprogram segítségével elkészítettem egy úszókeretes tárcsaféket, és a mozgásait is szemléltettem szimulációval.
Az úszókeretes Tárcsafékben a nyereg a rögzített tartóban elmozdulhat. A féknyeregben lévő dugattyú a hozzá tartozó fékbetétet a féktárcsához szorítja. A reakcióerő hatására a nyereg eltolódik és a másik fékbetétet is a féktárcsához húzza.
Az úszókeretes tárcsaféknek csak egy munkahengere van, amelynek dugattyúja fékezéskor csak az egyik oldalról nyomja a fékbetétet a féktárcsához. A fellépő reakcióerő eltolja a fékhengert, amely az úszókereten megtámaszkodva addig tolja el a keretet, amíg a másik oldalról a féktárcsához nyomódik. A fékbetétek keskeny oldalfelületükkel fekszenek a féknyergen, és így adják át a fékezőnyomatékból származó fékerőket.
A kerékoldali beépítési helyigény csökkentésével az úszókeretes tárcsafék negatív kormánygördülési sugár alkalmazását teszi lehetővé. Nincsenek nagy helyigényű csavarkötések. A fékfolyadék kevésbé melegszik, mivel csak egy dugattyúfelület viszi át a hőt.
Édesapám autószerelő volt, így nem volt nehéz egy Zastava 101 típusú személygépkocsi első tárcsafékét beszerezni, és eredeti méretek alapján elkészíteni a számítógépes modelljét.
A modellezés folyamatát be is mutatom a dugattyún.
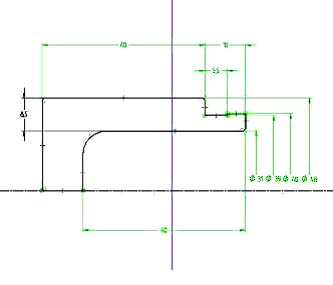
A forgáskihúzás parancsra kattintva kiválasztjuk a profil síkját, és a fenti kép szerint megrajzoljuk a keresztmetszet körvonalait.
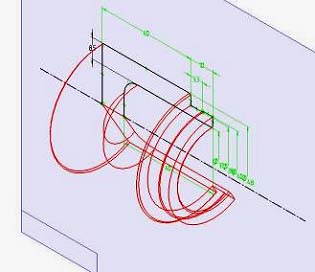
Majd megadjuk, hogy mekkora szögben szeretnénk a kihúzást alkalmazni. Esetünkben vagy 360º-ot adunk meg, vagy kiválasztjuk egy kattintással a 360º-os forgatást.
 Íme, a kész dugattyú.
Íme, a kész dugattyú.
Miután mind a 13 alkatrészt az előbbi módszerrel lemodelleztem, jöhet a szerelés.
A szerelés környezetben kényszereket állíthatunk fel két, vagy több alkatrész között, például, hogy két felület feküdjön egymáson, vagy két hengeres alaksajátosság koncentrikus legyen.
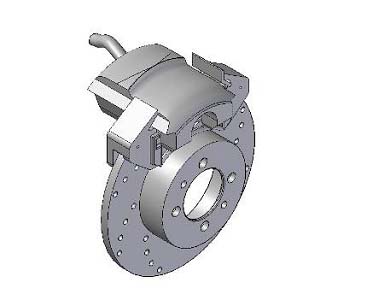
A megfelelő kényszerek alkalmazásával megkaptam a fenti képen létható szerelést, és már csak a szimuláció volt hátra a siker eléréséhez. A kinematikai szimuláció előtt meg kell bizonyosodnunk arról, hogy a mozgatásra kiszemelt alkatrészek nincsenek-e túlkényszerezve. Például a dugattyú el fog mozdulni a hengerben, tehát az előbbi kényszert, miszerint a féknyereg felülete, és a dugattyú felülete egy síkban van, törölni kell, mert csak kezdetben lesz egy síkban, és az elmozdítását a kényszer nem engedné. Miután ellenőriztük a kényszereket, átváltunk a szerelésiből a kinematikai szimuláció környezetbe.
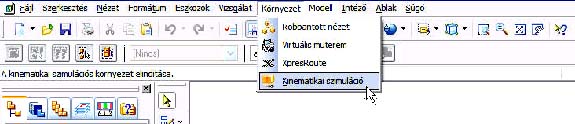
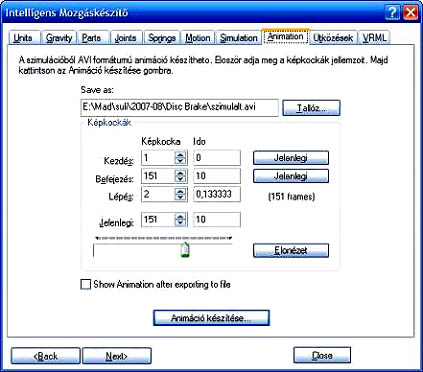
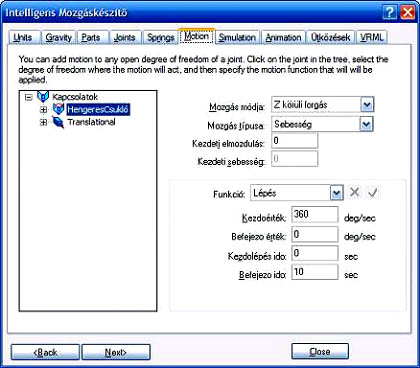
Itt az intelligens mozgáskészítőt használjuk a mozgás elkészítésére.

A mozgásoknál a hengeres csuklónak, azaz magának a tárcsának egy Z tengely körüli forgást adtam, úgy, hogy tíz másodperc múlva megálljon.
A másik mozgási lehetőség a dugattyú eltolása Z irányba, és mivel a mozgás irányát a program rosszul feltételezte, negatív előjellel adtam meg az elmozdulás távolságát.
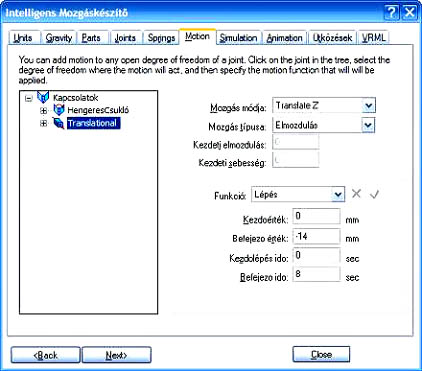
Miután leellenőriztük, hogy minden adat rendben van megadva, beállítjuk az időtartamot és a képkockák számát, majd lefuttatjuk a szimulációt.
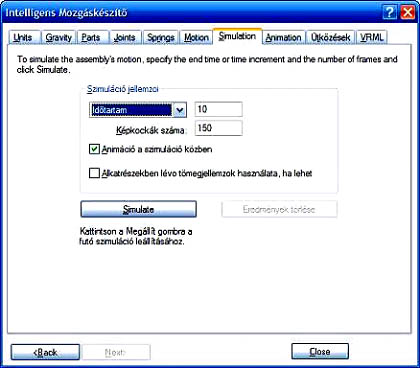
Ha itt is mindent rendben találtunk, és meg szeretnénk osztani másokkal is, elmenthetjük munkánkat AVI filmformátumba.